The basic DCC architecture I use is based on the ESU ECoS system. While the electronics and features are outstanding there is often a lack of clarity in the manuals which can lead to confusion. Here is how I set up signaling and automatic braking on my test layout. (The forced use of a test layout while I get the main one ready is helping me tremendously in getting to know the ECoS system intimately.)
So I use Kato Unitrack and this means that each switch (point) is using up one location on the SwitchPilot and SwitchPilot Extension. To understand how to implement a Kato switch on ESU follow this link.
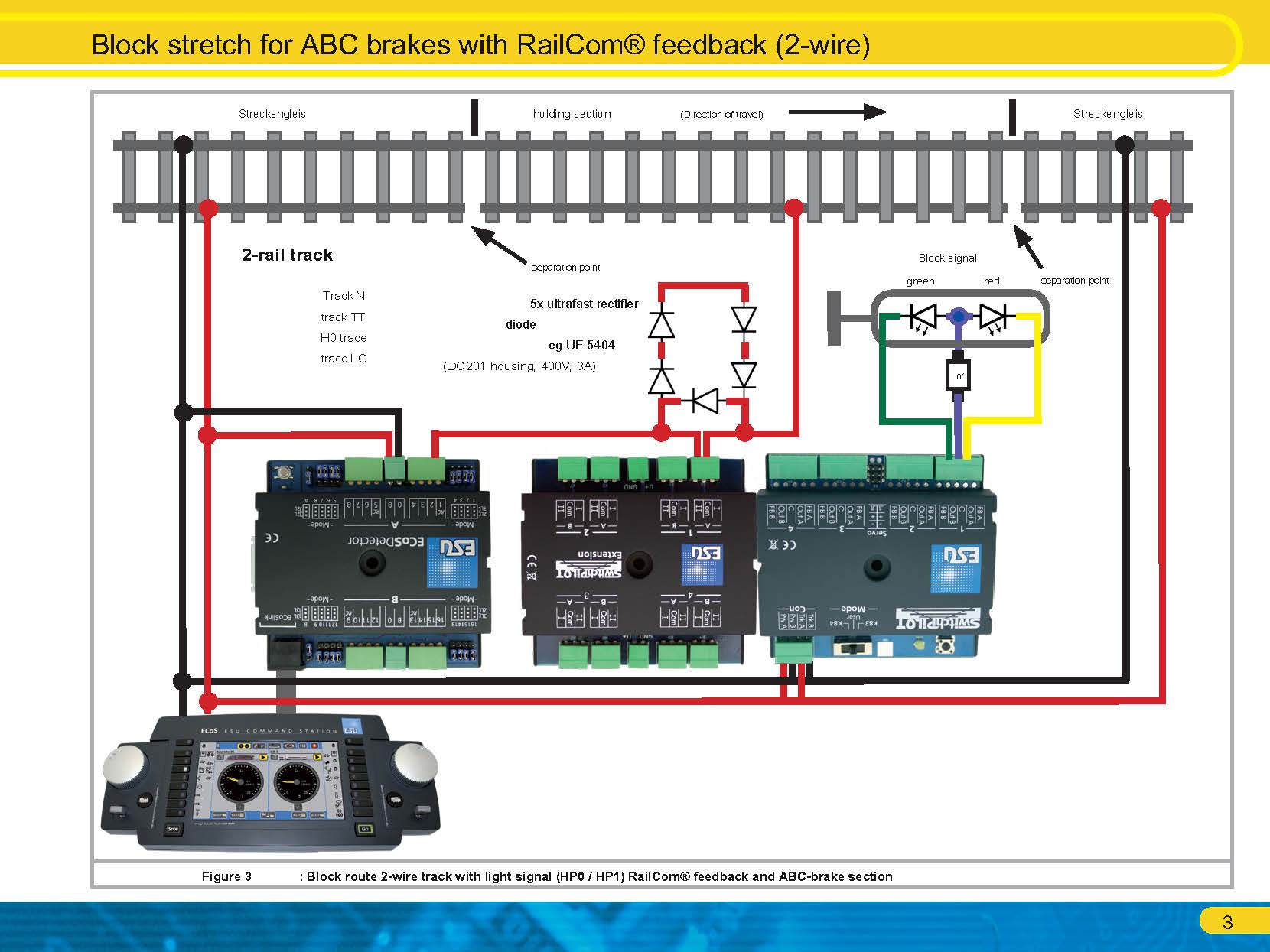
ESU provides a detailed description of signaling and braking and with clear explanation but in German. So I am providing the block diagrams in English.